
In the last post we explored how elbow power represents the body momentum, and proposed that its properties are preferably described as solid and immense, in contrast to the idea of heaviness people usually aim at. In the end of the post I highlighted that such elbow power is foundational to multi-directional forces in arm movements. Hereunder we further discuss.
The quality (solid) of such elbow power enables its another property: pinning the elbow tip in the space.
A pin is thin and sharp. Consider a movement of cutting downward onto the opponent’s forearm. The opponent’s forearm is pushing back your cutting movement. You would want to keep your elbow stably at its current position, not to be moved upward by him. Otherwise, the cutting force will lose its support and will be dispersed.
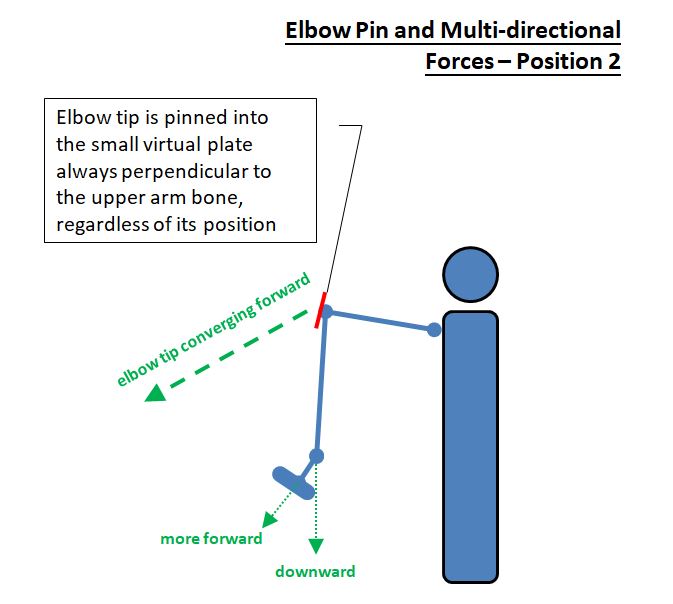
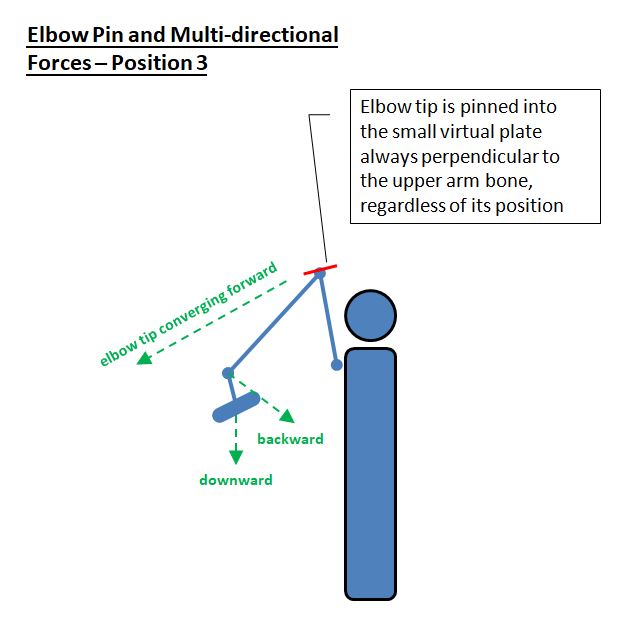
In the point-linked structure mechanism, this is achieved by imagining the elbow tip being “attached” onto a small virtual plate, which is always perpendicular to the upper arm bone, by using a very thin and sharp pin – so thin that the pin is immaterial; so sharp that the “pinning” action is effortless. The elbow tip is described as being pinned at its position as a point in the space. In effect, the imagination of the virtual plate keeps the pinning thin and sharp.
The same pin at the elbow tip, on the other hand, can freely spin the forearm on its own to any direction (as far as the elbow joint allows), to anywhere covered by the cone defined with the forearm (from the elbow tip to the wrist centre point) as the radius. The pin separates the forearm from the power unit (as explained in previous posts), letting them act as two distinct entities.
Remember the upstream/downstream relationship concerning movements in the point-linked structure. Now that the elbow tip is pinned stably at its position, as well as made to converge FORWARD by its upstream joint structure (of the power unit). But at the same time the forearm is spinned by the same elbow tip to cut DOWNWARD onto, and probably beyond, the opponent’s arm. All this occurs instantly in the same movement; bi-directional forces occur at the contact with the opponent.
In the upstream/downstream relationship, the forearm doesn’t pull or push the elbow tip, i.e. it has no effect on deciding the elbow pin’s position. Conversely, the pin exclusively decides the movement of the forearm, manifested as the position and the moving direction of the wrist centre point. Interestingly and in the same manner, the wrist centre point spins the palm structure, and exclusively decides the moving direction of the palm and fingers; the palm structure does not pull or push the wrist and has no effect on deciding the wrist’s position. In the cutting downward exercise above, the palm structure can be spinned downward as well but a bit MORE FORWARD than the forearm (say, to aim more at the opponent’s body), adding one more direction to the same cutting movement. So on and so forth. In fact, every joint (including the finger joints) can add one more different direction to a same movement. The result is the multi-directional forces in the forearm that the opponent has to deal with at the same instance.
So far only the arm is considered. You can well imagine how rich multi-directional forces could be when all other joints in the body are also set to operate.
Why are multi-directional forces a desired advantage? When the opponent exerts a strong force on your forearm, at any particular moment the force is strong in one direction only. However, at that same particular moment your contact with him is rich in diverse forces – some are in directions appropriate for containing his unidirectional force, some are in other directions from which attacks can be launched as desired. Put it simply: The opponent has to somehow “fix” his structure in order to maintain the strong force exerting on you, and thus is not free to change the shape of his structure as well as the direction of the force, something can only be possible after releasing the force engagement at the tight contact; this is however not a restriction to you due to the ability of delivering multi-directional forces at that contact, and you are free to change shape and direction as desired.
As such, are we saying that you cannot move the elbow as it is being pinned at the current position? No. When the elbow moves, the elbow tip is being moved together with the small virtual plate, i.e. still pinned, thin and sharp, in the space. (Remember, the plate is always perpendicular to the upper arm bone at the elbow tip.) You never unpin the elbow tip from that plate, and then your opponent can never unpin it too! In this way the above-depicted mechanism of delivering multi-directional forces will always apply regardless of the elbow’s position.
2019.01.31
